") YAT (Yet Another TurtleBot)
YAT (Yet Another TurtleBot)
microROS and ROS 2
Development of mobile robot for monocular SLAM
![]()
Introducción
El entorno ROS es un framework de software libre y de código abierto diseñado para permitir el desarrollo de aplicaciones robóticas distribuidas. Este framework proporciona un conjunto de herramientas para la creación, gestión, depuración y análisis de sistemas robóticos.
La segunda versión de la herramienta, denominada ROS 2, fue desarrollada por la comunidad con el objetivo de mejorar la escalabilidad, la fiabilidad y la seguridad del software. Una de sus principales caracterı́sticas es que está diseñado para ser modular y extensible, lo que significa que los desarrolladores pueden elegir los componentes que necesitan para sus aplicaciones y utilizarlos de manera flexible. También se enfoca en proporcionar una abstracción de hardware más clara y permitir el uso de diferentes sistemas operativos y arquitecturas.
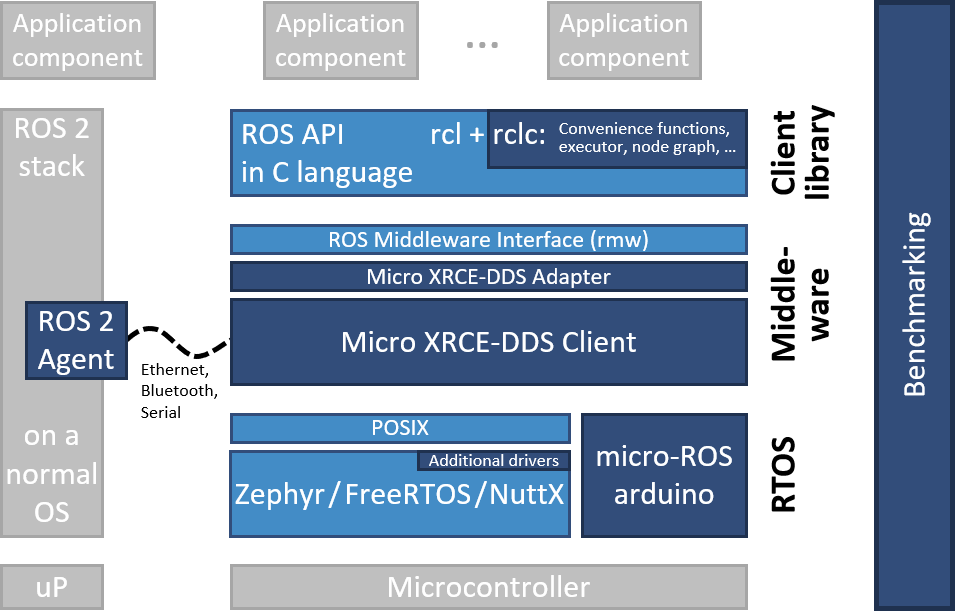
La herramienta micro-ROS es una implementación de ROS 2 diseñada especı́ficamente para sistemas embebidos y de tiempo real. A diferencia de ROS 2, que se ejecuta en sistemas operativos de propósito general, micro-ROS se ejecuta en sistemas operativos de tiempo real (como NuttX y FreeRTOS), lo que permite el desarrollo de sistemas robóticos en entornos de baja potencia y recursos limitados.
Como puede observarse en la figura 2, micro-ROS proporciona una capa de abstracción que permite la comunicación entre los sistemas embebidos y los nodos de ROS 2 en otros sistemas. Esto significa que los desarrolladores pueden crear sistemas robóticos distribuidos, que utilicen tanto sistemas embebidos como sistemas de propósito general y que todos ellos puedan comunicarse a través de la misma plataforma.